What makes a lidar truly state-of-the-art?
The importance of 3D sensing for autonomous and safe navigation has long been confirmed. Yet, the adoption of lidar is going slow. Expensive mechanical lidars are still the standard. As in many other technical domains, upscaling is only possible when there is a switch to a solid-state solution. Such a winning low-cost design is tightly linked to the selection of the basic technology. The state-of-the-art solution handles performance and cost with equal importance right from the start of its groundwork research.
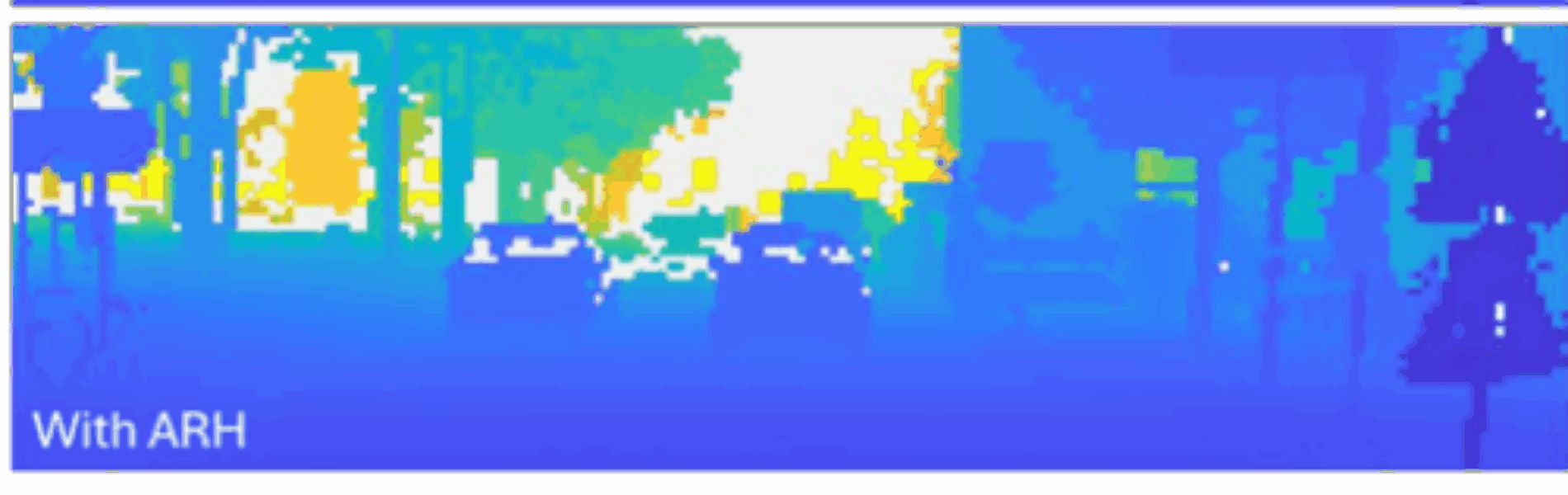
Additionally, a number of critical challenges for lidar need resolving. Reflector handling is one of the most important ones. Traffic signs and reflectors have been designed to return a lot of light under weak ambient light conditions. In order to achieve long measurement ranges, lidars emit of lot of laser light. When this light hits traffic signs, the return signal is so powerful that it often blinds the lidar itself. The resulting artefacts and straypoints in the 3D pointcloud confuse the scene interpretation dramatically. Very few lidars deal well with reflectors. This often requires significant postprocessing and cleaning of the pointcloud to separate valid from invalid data points. Xavia’s (XenomatiX’ lidar) “Advanced Reflector Handling” provides an answer to this critical challenge and eliminates the need for resource-intensive postprocessing.
Autonomous navigation requires monitoring a large part of the surrounding space. To avoid blind spots, multiple sensors are required, resulting in a lot of measurement data. To prevent large data transfers and to assure low latency for quick system response, it is advisable to have smart lidars with on-board processing power to (at least partially) process and analyze the measurement data. Xavia’s on-board computing power aids in reducing the complexity and increases the efficiency and performance of the lidar product. Ultimately, light AI, requiring limited computing power makes the lidar system smart. We refer to this as Edge AI.
An additional downside of the sequential measurements of scanning lidar systems is the influence of vibration and ego-motion during the measurements. In order to combine all sequential measurements in a single coordinate system, the displacement of the sensor during the measurements has to be compensated for. This is very difficult task as small vibrations of the sensor can cause a large shift when measuring at a large distance. Xavia’s illumination scheme mitigates these struggles significantly.
Another key requirement of autonomous navigation is the ability to accurately measure distances both at very short range and over long distances. In a traffic situation, a preceding vehicle (with reflectors or license plate) can cover part of the field of view, while another road user far way in the other part of the field of view still must be observable. For a lidar this imposes challenges on the illumination side. Low laser power is required to detect high reflective objects nearby, while high laser power is desired low reflective objects far away. This latter requirement conflicts strongly with the desire to flood illuminate the scene. Xavia features a wide dynamic range, allowing it to detect highly reflective nearby targets while simultaneously identifying low-reflectivity objects at long distances within the same field of view.
To summarize all of the above, a state-of-the-art lidar for safety-critical navigation shall have the following characteristics:
-
A cost-effective design
-
Ability to deal with reflectors and traffic sign (without being (partially) blinded)
-
On-board processing power for (partial) processing and/or interpretation of the measurement data. Ultimately, edge AI in the lidar is desirable.
-
Full coverage of the scene, both on the illumination side (laser light) and with sensitive elements (TOF pixels)
-
Low sensitivity to vibrations and ego-motion
-
High dynamic range, able to simultaneously measure high reflective objects at a few centimeters, partially in front of the lidar, together with low reflective objects far away (>50m) elsewhere in the field of view.
XenomatiX’ solid-state lidar, Xavia, meets all these requirements. Find out more here